Kuka YouBot Manipulation in V-Rep
This project is the final capstone of course Robotic Manipulation. The goal of it was to manipulate the KUKA youBot (a robot with with four mecanum wheels and a 5R robot arm) to pick up a cube and drop it off at a target configuration, given the initial and final configuration of the cube. This project covered the knowledge of trajectory generation, motion planing, odometry and PID controller. I programmed with python to finish this project.
Workflow
The first step of this project was to generate the reference trajectory of end-effector based on the initial and final configuration of the cube, which will be the desired configuration Xd of end-effector at each time step. Given an initial configuration of youBot, I applied a PID controller to derive the twist at each time step based on the current end-effector configuration error Xerr.
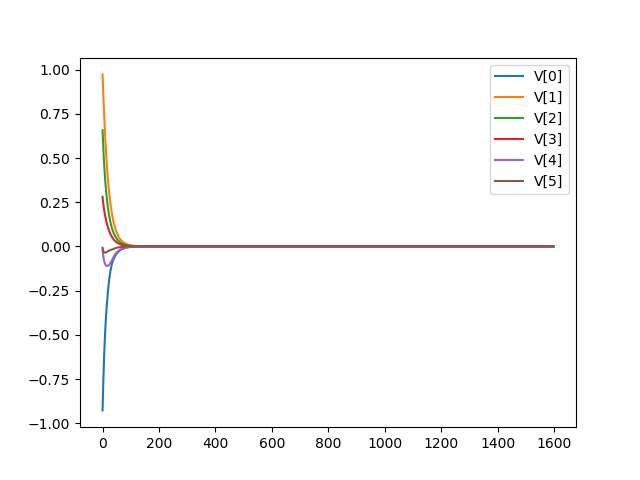
Xerr plot with time
The commanded speed of each youBot joint can be derived by its dynamic model, which drove the motion of youBot. Each joint value can be predicted at the next time step and the configuration at the next time step can be re-applied into this workflow to derive tha joints trajectory of the youBot.